All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
Cooig
Equipamento comercial & maquinaria
Suprimentos de Restauração e Hotelaria
Robô Comercial
Robôs de segurança
Detecção de obstáculos de robô
(724 produtos disponíveis)
Previous slide
Next slide
ACEBOTT AI Vision
Robot
Car Kit com Detecção de Obstáculos e Rastreamento para Aprendizagem e Programação Arduino Robotics
32,09-68,88 €
Pedido Mínimo: 1 Peça
Previous slide
Next slide
CE & FCC Compliant Food Delivery
Robot
com 360 °
Obstacle
Detection
e Voice Control
3 251,56-5 630,33 €
Pedido Mínimo: 1 Unidade
Previous slide
Next slide
Robô De Limpeza De Patrulha De Alto Desempenho Com Detecção De Obstáculos
38 504,39 €
Pedido Mínimo: 1 Conjunto
Previous slide
Next slide
Smart Car
Robot
E18-D80NK Infrared
Obstacle
Avoidance Sensor fotoelétrico Interruptor de Proximidade 3-80cm
Detection
Range Ajustável
0,9841-1,07 €
Envio por peça: 4,69 €
Pedido Mínimo: 2 Peças
Previous slide
Next slide
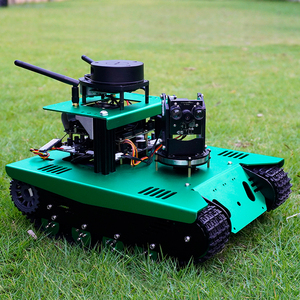
Yahboom ROS Transbot
Robot
AI LIDAR ROS
Robot
Tank
Robot
Robot
educação com mapeamento Navegação
Obstacle
Avoidance para Rpi e Jetson
305,39-644,13 €
Envio por peça: 100,02 €
Pedido Mínimo: 1 Peça
Previous slide
Next slide
AI LIDAR ROS
Robot
car SLAM Build Map Navigation
Obstacle
Avoidance with depth camera 3d scanner Tank Mobile
Robot
Platform
388,33-455,29 €
Pedido Mínimo: 2 Peças
Previous slide
Next slide
AI LIDAR ROS
Robot
Car SLAM Construir Mapa Navegação Evitar Obstáculos com Câmera de Profundidade 3d Scanner Tanque Robô Móvel Plataforma
388,33-455,29 €
Pedido Mínimo: 2 Peças
Previous slide
Next slide
Preço barato Forte Resistência Automática Comercial Industrial Varrendo Piso Limpeza Esfregando Robô Aspirador Robô
5 561,87-5 989,71 €
Pedido Mínimo: 1 Metro quadrado
Previous slide
Next slide
ACEBOTT Sensor Baseado Obstáculo Detecção Linha Rastreamento STEM Educação
Robot
Tank Vehicle Kit para Arduino
10,87-36,79 €
Pedido Mínimo: 2 Peças
Popular na sua indústria
Cozimento
Cantando
Bolha Tea Shop Suprimentos
Processamento alimentação gado
Previous slide
Next slide
2025 Novo Produto Obstáculo Detectando Entrega Robô Home Path-planejamento Food Home Delivery
Robot
7 444,35-7 615,49 €
Pedido Mínimo: 1 Unidade
Previous slide
Next slide
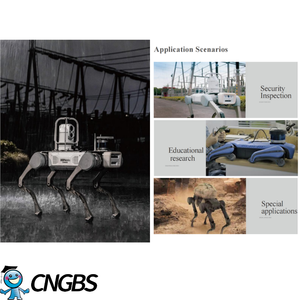
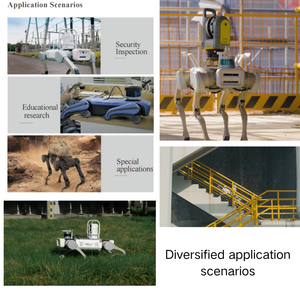
Cão alto esperto do robô da inspeção do AI da carga útil com detecção gás Evitação dinâmica do obstáculo para centrais elétricas industriais
103 136,72-128 618,63 €
Pedido Mínimo: 1 Conjunto
detecção de obstáculos a laser de segurança
detecção ultrassônica do obstáculo do sensor
detecção de obstáculos para estacionamento
equipamento detector espião
detecção ultrassônica do obstáculo
resposta detecção precoce
detecção de anomalias magnéticas
detecção passatempo
detecção portátil de explosivos
equipamento de detecção eletrônica ndt
equipamento detecção do estrago
detecção 0.01mm
equipamento de detecção de imagem
detecção precoce precisa
custos de detecção de intrusão
Previous slide
Next slide
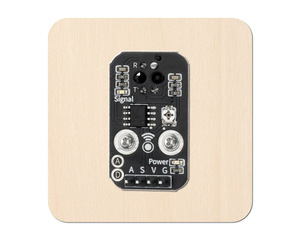
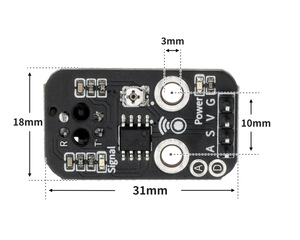
HS-S01A Infrared
Detection
Sensor Module Rastreamento Obstáculo Avoidance Module Compatível com Arduino Kit DIY
Robot
Kit
0,5049-1,05 €
Envio por peça: 4,86 €
Pedido Mínimo: 1 Peça
Previous slide
Next slide
24/7 Manufacturing Cleaner Carpet & Hard Floor Hybrid Cleaner Detecção De Superfície Automática
24 814,49 €
Pedido Mínimo: 1 Conjunto
Previous slide
Next slide
Auto-conduzido Design Totalmente Cercado Máquina De Limpeza De Piso Máquina De Lavagem De Piso Robô De Limpeza
5 561,87-5 989,71 €
Pedido Mínimo: 1 Metro quadrado
Previous slide
Next slide
Detecção De Obstáculos Robô De Entrega Em Casa Resposta Rápida Robô De Entrega Solar
3 422,69-4 706,20 €
Pedido Mínimo: 1 Unidade
Previous slide
Next slide
Navegação Autônoma Robô De Limpeza De Piso Comercial Robô De Limpeza De Lodo Limpeza Inteligente
17 113,44-24 814,49 €
Pedido Mínimo: 1 Conjunto
Previous slide
Next slide
Fornecer CE Fábrica Equipamentos de Limpeza Industrial Rodo Piso-esfregando Automatic Floor Scrubber Machine Cleaning
Robot
5 561,87-5 989,71 €
Pedido Mínimo: 1 Metro quadrado
Previous slide
Next slide
Tela Inteligente Interativa Entrega Robô Custo Obstáculo Detecção Entrega Robô Chassi
3 422,69-4 706,20 €
Pedido Mínimo: 1 Unidade
Previous slide
Next slide
Auto robô esperto da limpeza para hotéis robôs comerciais limpeza do hotel do shopping
24 814,49 €
Pedido Mínimo: 1 Conjunto
Previous slide
Next slide
Bateria Powered Walk Behind Stand on Spin Recarregável Sweeper Floor Scrubber Cleaner Máquina Limpeza Robô
5 561,87-5 989,71 €
Pedido Mínimo: 1 Metro quadrado
Previous slide
Next slide
Obstáculo Detecção Entrega Robô Custo FRP Chassi Robô De Entrega Composto De Alta Resistência
3 422,69-4 706,20 €
Pedido Mínimo: 1 Unidade
Previous slide
Next slide
Câmera robô navegação 3d, obstáculo de navegação, luz estruturada de evitação vr/ar, câmera sensor de profundidade binocular
205,37-273,82 €
Pedido Mínimo: 1 Peça
Previous slide
Next slide
Imaging 3D
Robot
Industrial Posicionamento e Reconhecimento 3D ToF Medição Distância Obstáculo Avoidanc AMR Câmera Industrial
426,99 €
Pedido Mínimo: 1 Conjunto
Previous slide
Next slide
Robô de patrulha de segurança móvel autônomo para evitar obstáculos, inteligência artificial, inteligente
15 402,10-16 561,54 €
Pedido Mínimo: 2 Unidades
Previous slide
Next slide
Nova Inteligência Artificial Robô Sweeper Indoor Auto Limpeza Robô Aspirador Robô De Limpeza Comercial
24 814,49 €
Pedido Mínimo: 1 Conjunto
Previous slide
Next slide
Totalmente Automático Robô De Limpeza Wifi Vácuo De Alta Velocidade De Rotação Mop Robótico Aspirador Inteligente Limpando Robô De Limpeza
5 561,87-5 989,71 €
Pedido Mínimo: 1 Metro quadrado
Previous slide
Next slide
Obstáculo Detecção Multi-purpose Entrega Robô Estável Operação Entrega Robô Plataforma Out Door
3 422,69-4 706,20 €
Pedido Mínimo: 1 Unidade
Previous slide
Next slide
Robô de patrulha de segurança móvel autônomo com Inteligência Artificial e Câmera de Rede Móvel para Evitar Obstáculos
15 402,10-16 257,77 €
Pedido Mínimo: 2 Unidades
Previous slide
Next slide
Alta velocidade Estação Ferroviária Aeroporto Totalmente Automático Unmanned Driving Indoor Floor Limpeza
Robot
1 711,35-25 669,31 €
Pedido Mínimo: 1 Conjunto
Previous slide
Next slide
Driverless Inteligente Limpeza Robô Comercial Industrial Floor Washer Máquina Mop Varrer Vacuum Robô De Limpeza
5 561,87-5 989,71 €
Pedido Mínimo: 1 Metro quadrado
Previous slide
Next slide
Sensores De Detecção De Obstáculos De 360 ° Robô De Serviço Robô De Controle Inteligente Restaurante
3 422,69-4 706,20 €
Pedido Mínimo: 1 Unidade
Previous slide
Next slide
Venda Direta De Fábrica Robô De Piso De Limpeza Forte Casa Robô Inteligente De Limpeza A Vácuo
17 113,44-24 814,49 €
Pedido Mínimo: 1 Conjunto
Previous slide
Next slide
Alta Qualidade Robô De Limpeza Comercial Inteligente Varrer e Limpar Robô para Robô De Limpeza De Piso
5 561,87-5 989,71 €
Pedido Mínimo: 1 Metro quadrado
Previous slide
Next slide
Exposição táctil Obstáculo Eficiente Escaneamento Grande Ângulo De Detecção Inteligente Food Delivery
Robot
3 251,56-5 630,33 €
Pedido Mínimo: 1 Unidade
Previous slide
Next slide
E18-D80NK Sensor
Obstacle
Avoidance Sensor Infravermelho
Robot
Interruptor de Detecção ajustável
0,8557-3,43 €
Pedido Mínimo: 1 Peça
Previous slide
Next slide
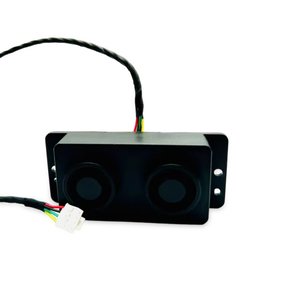
4 Sonda Ultrasonic Underwater Ranging Sensores Piscina Robô Obstáculo Prevenção Colisão Prevenção Detecção e Ranging
11,94-19,75 €
Envio por peça: 4,03 €
Pedido Mínimo: 2 Unidades
Previous slide
Next slide
Hot Laser variando sensor TOF Laser distância radar sensor Robotic obstáculo evasão UAV altura fixa detecção
19,26-21,82 €
Pedido Mínimo: 20 Peças
Previous slide
Next slide
Sensor ultrassônico de distância para carro, módulo de detecção de nível de água RS485, robô para evitar obstáculos, sensor ultrassônico de gênero de produtos
10,27-13,70 €
Envio por peça: 57,51 €
Pedido Mínimo: 20 Peças
Previous slide
Next slide
Hot Sale Segurança Laser Scanner CE Certified Waterproof Boa Qualidade Detecção 20m Precise para Mobile
Robot
Obstacle
Detection
340,56-342,27 €
Pedido Mínimo: 1 Conjunto
1
2
3
4
5
More pages
19
Principais categorias
Máquinas de Vestuário
Máquinas agrícolas e de processamento de alimentos
Suprimentos de Restauração e Hotelaria
Equipamentos Publicitários
Áudio, vídeo & iluminação profissional
Máquina de Impressão
Máquina de Venda Automática
Suprimentos de Loja e Supermercado
Equipamento Financeiro
Equipamentos de Solda
Artigos Funerários
Equipamentos de Limpeza
Equipamento Laser
Trade Show e equipamento do partido
Outros Equipamentos de Serviço
Sinalização digital
Previous slide
Next slide
Buscas Relacionadas:
detecção precoce precisa
custos de detecção de intrusão
detecção intrusão nuvem
equipamento de detecção de explosivos
detecção de veículos por magnetômetro sem fio
detecção explosiva portátil
sensores detecção obstáculo
equipamento detector objetos
detecção k 2
equipamento de detecção de explosivos
detecção de movimento da câmera
equipamento de detecção de vigilância
equipamento de detecção de velocidade
deteção de colisão frontal
detecção de intrusão ativa